Revolutionizing minimally invasive surgery with scalable actuator technology and cutting-edge digital assistance.
Project Objective
The current drive principles used in surgery and endoscopy rely either on the physical strength of the user or on conventional electromechanical drives. This results in fundamental limitations regarding integration into cyber-medical systems, cost structure, and reusability. The goal of this project is to research a scalable actuator platform for minimally invasive surgical instruments and endoscopes based on shape memory alloys (SMA).
Project Description
Minimally invasive procedures have revolutionized modern medicine and play a significant role in Germany, with more than 2 million laparoscopic operations and 6 million gastrointestinal endoscopies performed annually. In the endoscopic field, the design of the devices and accessories used for these procedures has changed virtually not at all over the past 40 years. In the field of laparoscopy, instruments are constructed as rigid metal shafts without joints in order to facilitate sterilizability. As a result, certain viewing angles on the surgical field can only be achieved with great difficulty, or in some cases cannot be achieved at all. Due to the absence of electronic actuation, it is currently also not possible to integrate these instruments into modern assistance systems (“cybermedical systems”). The only current alternative is provided by large stationary robotic systems (such as the Da Vinci robot), which do feature articulated joints but are associated with high acquisition, operating, and reprocessing costs, and therefore cannot be operated economically by smaller clinics. This is the point at which the EndoSMART project intervenes: the development goal is robotic single-use handheld devices that are integrated into digital assistance systems, thereby bridging the gap between outdated manual instruments and expensive large-scale robotic systems.
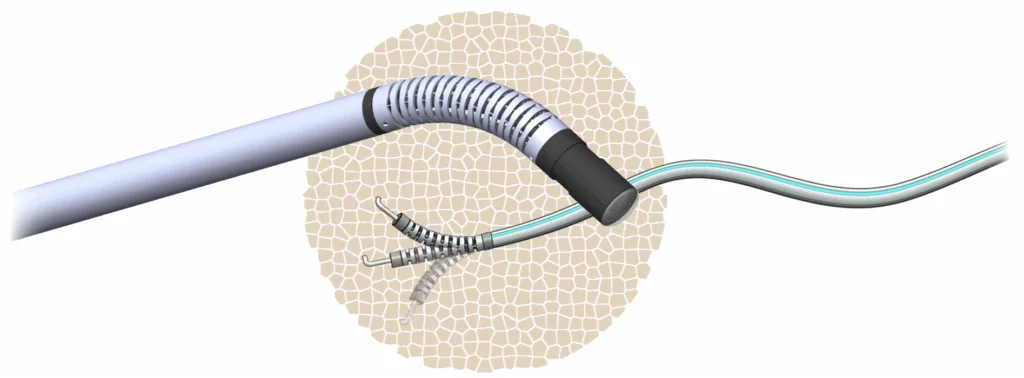
The actuator basis for these systems consists of wires made from the shape memory alloy (SMA) Nitinol. Due to their high performance capability and outstanding scalability, they offer enormous potential as an actuator platform for laparoscopic and endoscopic single-use instruments. Within the collaborative project “NGScopes”, a demonstrator was already developed that demonstrated the fundamental suitability of SMA actuators for use in such instruments. In the context of the current research project “EndoSMART”, the present state of development is now taken up and further open problems are addressed. Some of these are fundamental in nature and include, for example, the implementation of a thermal management system as well as the scaling of the actuator platform for use in laparoscopic tools. Key research questions in this regard are the design of a miniature joint that is flexible in bending yet rigid under compression, as well as the requirements-specific adaptation of the actuator force. In order to highlight the innovation potential of SMA-driven instruments, the user interface plays an outstanding role. Here, initial practice-relevant digital assistance functions are to be explored and subsequently implemented in terms of hardware and software, and tested by future users.
The project is conceived as a collaborative project in which various partners contribute their expertise to develop innovative solutions. Contronix Engineering GmbH takes on responsibility for electronics development, which is essential for the control of the instruments. In parallel, the design of the devices as well as the development of the user interfaces is handled by Wolfram Designer und Ingenieure. The Chair for Microsystems Technology at TU Dresden is dedicated to developing the actuator and hardware concept, while the design and testing of plastic components is carried out at the Leibniz Institute of Polymer Research Dresden. SITEC Industrietechnologie GmbH is responsible for the complex challenges of manufacturing automation. The Else Kröner Fresenius Center for Digital Health serves as the interface to clinical users and testers, and additionally accompanies the project at the regulatory level. Through the close collaboration of these partners, an interdisciplinary project is created that combines technological innovation with practical application.
Facts and figures
Coordinator: TU Dresden
Start Date: December 1, 2023
End Date: April 30, 2027
This project is funded by the European Union and the Free State of Saxony under grant agreement number 100693304. The views and opinions expressed are, however, those of the author(s) only, and do not necessarily reflect the views of the EU or the Free State of Saxony. Neither the EU nor the Free State of Saxony, nor the granting authority, can be held responsible for them.
Project Partner:
- TU Dresden, Institut für Halbleiter- und Mikrosystemtechnik (IHM)
- Else Kröner Fresenius Center for Digital Health
- Leibniz-Institut für Polymerforschung Dresden e.V.
- Contronix Engineering GmbH
- WOLFRAM Designer und Ingenieure
- SITEC Industrietechnologie GmbH